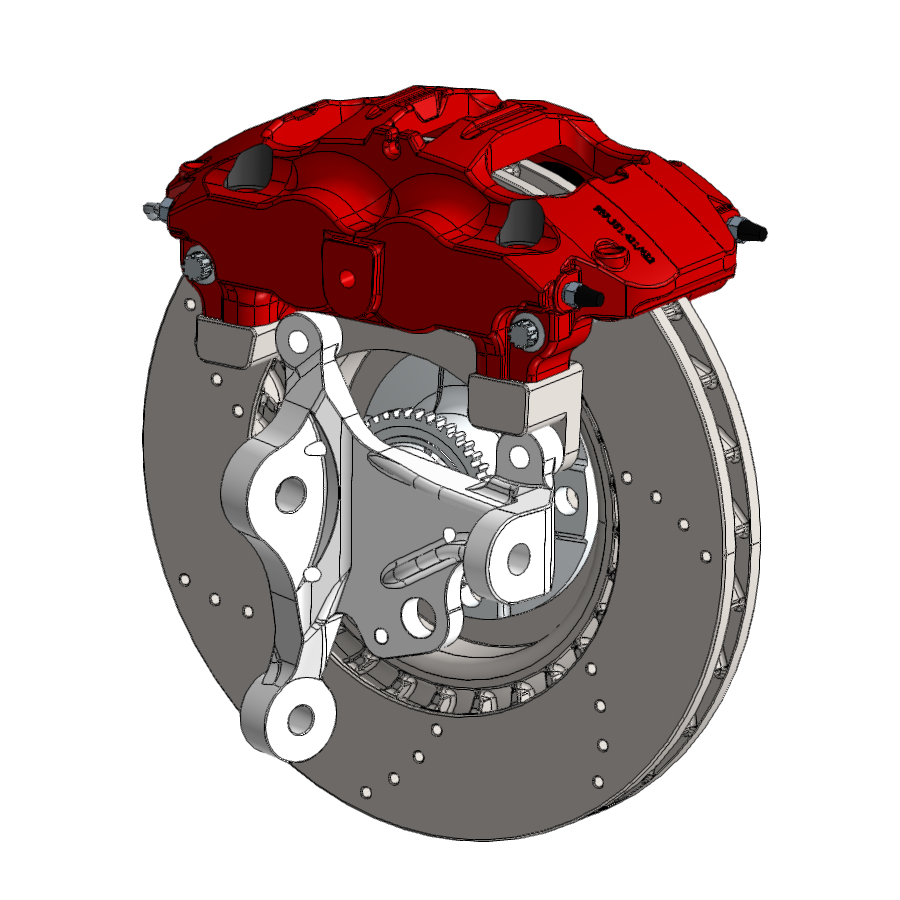
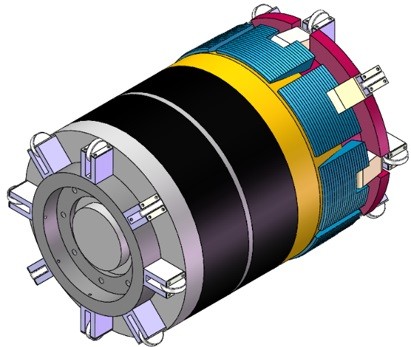
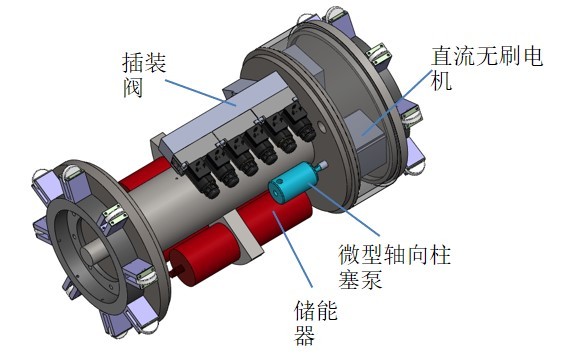
该团队学生在长输油管道智能封堵机器人项目中,参与了封堵模块设计、调速清管模块设计、伸缩模块设计、模块间的过线万向轴设计、液压系统方案设计、控制与通讯模块设计和安全辅助系统设计,实现了远程无线控制智能封堵机器人在管内的快速稳定封堵,解决了现场封堵作业存在的多点不足,保证了管道维抢修作业的安全有效运行。该团队学生所设计的封堵机器人同国外TDW公司的Smart Plug TM与STARTS Group公司的Tecno Plug TM相比添加了旁通调速功能与管内自行走功能,不仅可以控制智能封堵机器人在管内的移动速度,同时保证机器人定位更加精确,还可以保障机器人在运行过程中克服一定的阻力(如爬坡,断塞,异物等),使得其整体性能和功能设置均优于国外同类产品。
电话联系 19940662206
机械小沈在线服务